Years 2016
Author Lucci Manni Mario
Advisor Giorgio Dalpiaz
Bachelor/Master Bachelor
Company MechVib RG
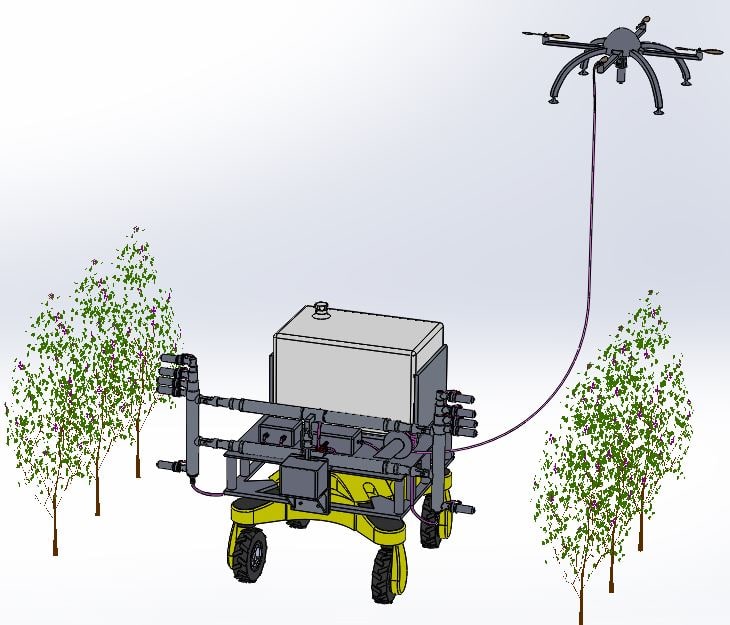
The aim of the thesis is to design and implement a scale model of a robot for the
distribution of pesticides in agricultural rows, to further automate agricultural
cultivation. Then a first scale prototype was realized, using a 3D printer.